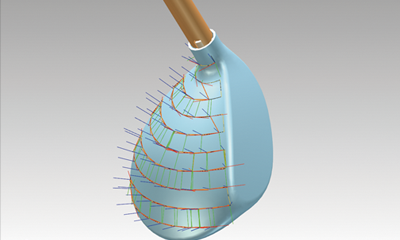
自主研发核心技术,解决复杂的编程问题
九大类生成轨迹方式,上百个轨迹参数,数十个参数化轨迹修改方式,总有一款适,数十个参数化轨迹修改方式,总有一款适,数十个参数化轨迹修改方式,总有一款适合您。...
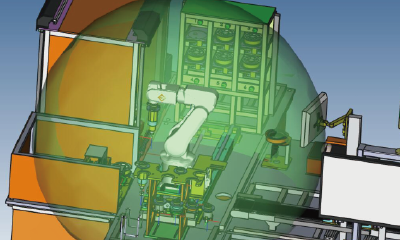
软件不仅可以计算机器人的法兰位置的可达空间,也可以计算机器人末端执行器的可达空间,让您的工作站设...
机器人工作方式常见的有以下两种:①手持工具,零件固定。②手持零件,工具固定...
5分钟快速入门,10阶段系统化课程学习
 加载中
加载中


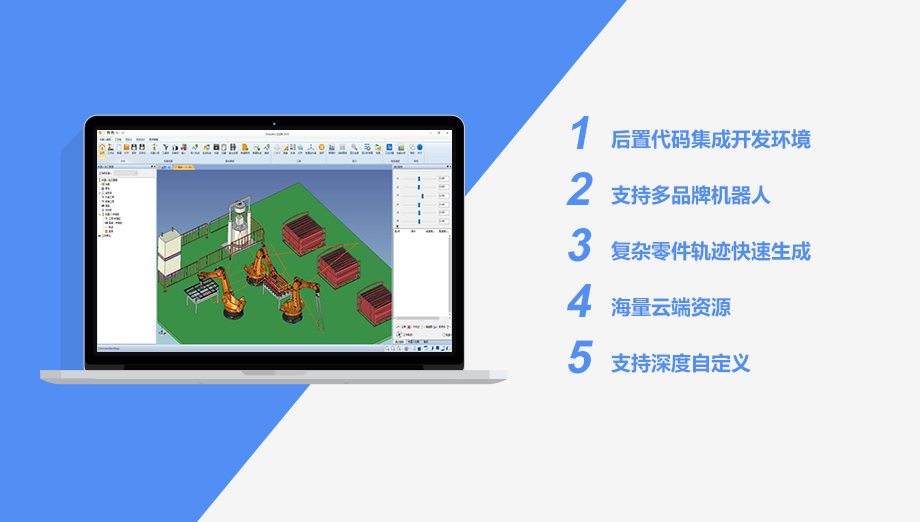
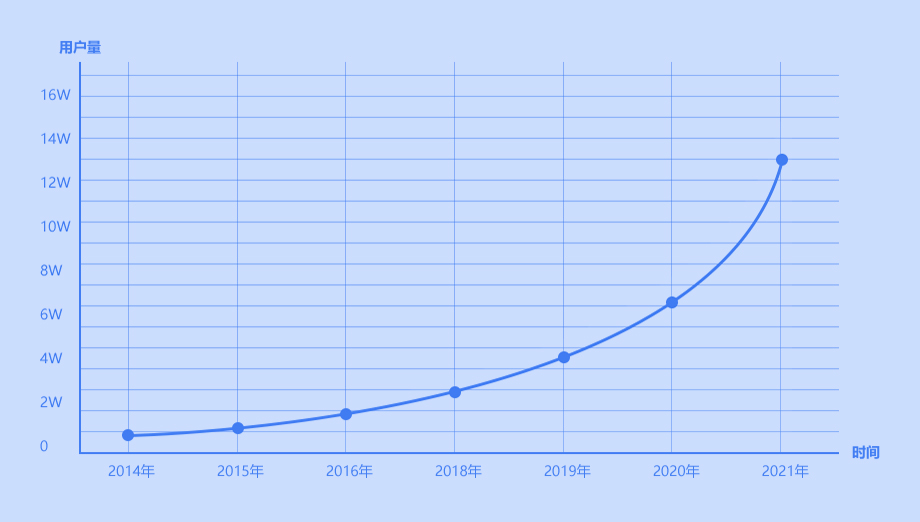

 多年沉淀
多年沉淀 5大特色
5大特色 10万+用户的选择
10万+用户的选择
 更多
更多









 010-89755166转810
010-89755166转810


