摘要:为零件添加CP点和RP点时,需要场景中存在机器人和工具。
为零件添加CP点和RP点时,需要场景中存在机器人和工具。
场景中存在机器人、工具的情况下,对零件的抓取有两种方法:
利用三维球调整机器人和工具的位姿,使其处于抓取零件时的姿态。
| 定义零件,给零件添加附着点CP和RP。
|
|
|
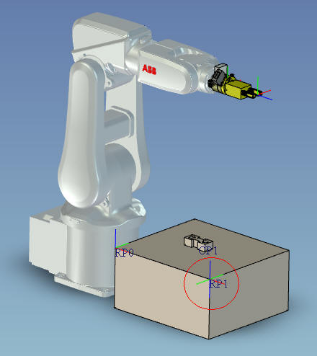
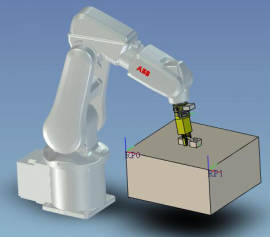
本例中的场景如下图所示,机器人上安装有一个法兰工具和快换工具夹爪,需用夹爪抓取并放开“工”字形零件。抓取时,工具抓取零件上的“抓取点”;放开时,零件与的点称为“放开点”。
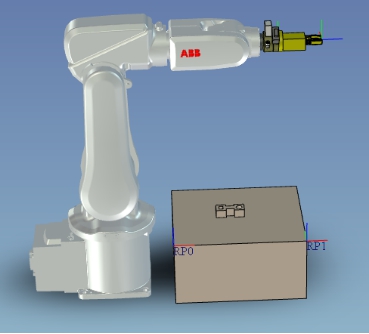
图示:定义零件场景图
n添加抓取点CP
添加的步骤如下图所示:
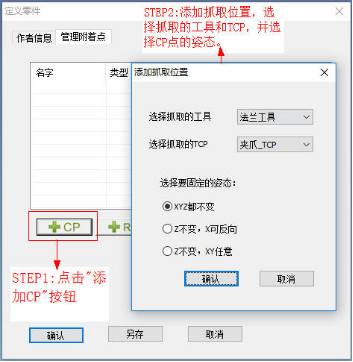
图示:添加CP点步骤
v选择要固定的姿态:
这里提供了三种附着点的姿态,设置的是抓取时机器人的抓取姿态。
一般情况下的抓取规则:工具TCP的Z轴与CP点的Z轴相对,两者的X轴同向,Y轴反向。
XYZ都不变:机器人抓取时按照一般情况下的抓取规则抓取;
Z不变,X可反向:抓取时如遇到不可达或者其他障碍情况,机器人可打破一般抓取规则,抓取方向为CP点X轴旋转180°的方向。
Z不变,XY任意:此种设定让机器人的抓取姿态更为灵活。根据零件的位置,机器人可不受限制地选择抓取的方向。
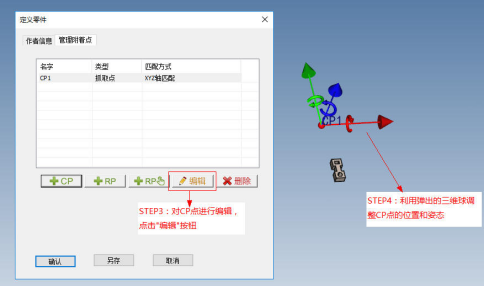
图示:编辑CP点步骤
添加完CP点后,效果如下图所示:
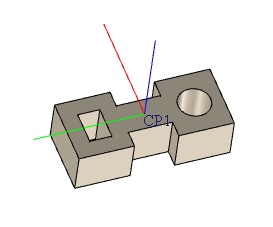
图示:生成的CP点
n自动添加放开点RP
注意:在为零件添加放开点之前,放置零件的工作台上需要有放开点RP。
RP的添加有两种方式:自动和手动。
 自动添加放开点按钮:通过“添加放开位置”对话框,选定零件放开点的位置和姿态。
自动添加放开点按钮:通过“添加放开位置”对话框,选定零件放开点的位置和姿态。
 手动添加放开点按钮:利用直接弹出的三维球对RP点进行编辑。
手动添加放开点按钮:利用直接弹出的三维球对RP点进行编辑。
自动添加放开点的详细步骤见下图:
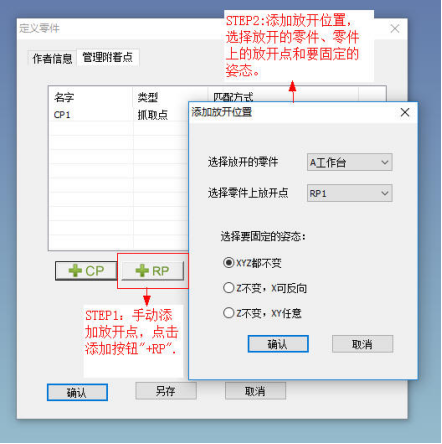
图示:自动添加放开点步骤
注意:这里“选择放开的零件”为安放定义零件的工作台。
“选择零件上放开点”为工作台上的放开点RP。
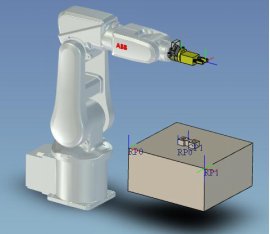
生成的放开点姿态如下图所示:
图示:生成的放开点
n手动添加放开点RP
手动添加放开点RP的详细步骤见下图:
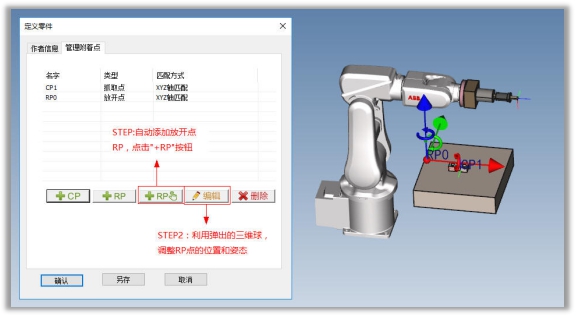
图示:手动添加放开点步骤
根据需求,利用三维球调整RP点的位置和姿态,本例中调整好的放开点如下图所示:
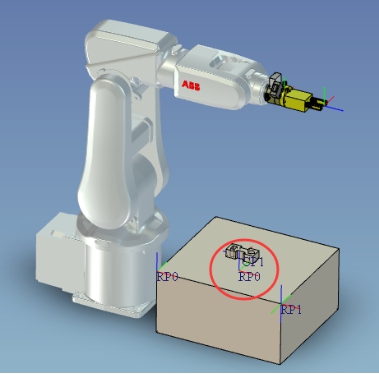
图示:生成的放开点
关键字: 零件上添加CP点和RP点



















 010-89755166转810
010-89755166转810


